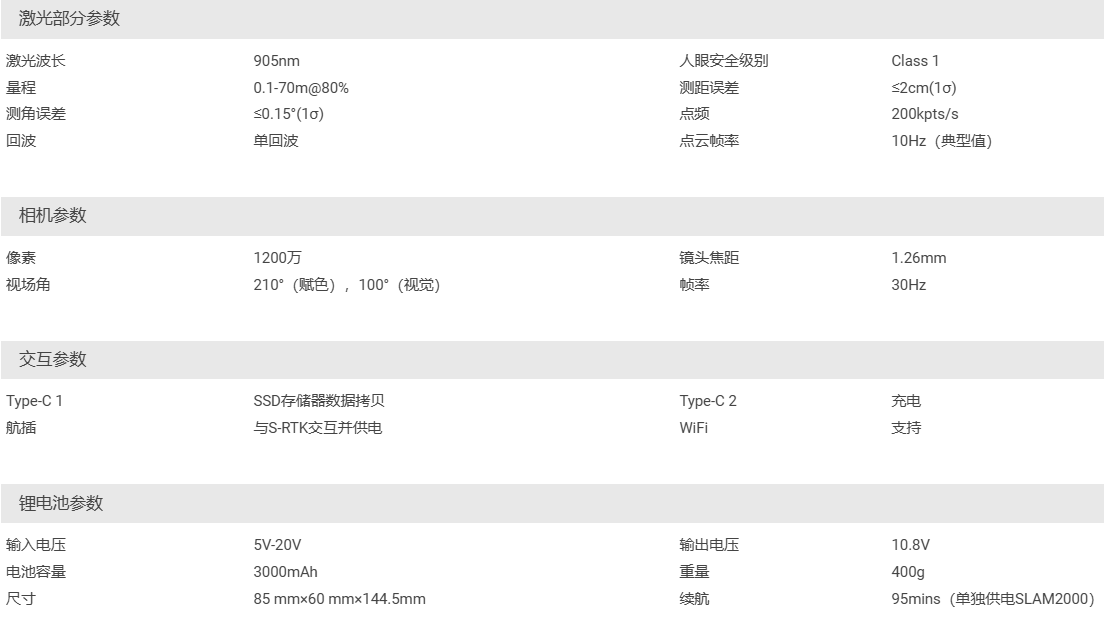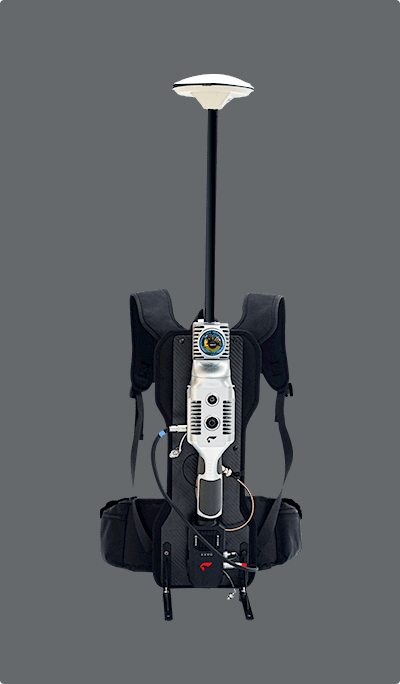
飞马 SLAM2000
SLAM2000采用半球形非重复式扫描激光传感器,
结合旋转云台可实现720°无死角点云覆盖;
新增视觉相机,引入视觉SLAM算法,
可有效提升弱结构特征场景的三维重建适应性;
详情请咨询:
郭经理:17312275363
马经理:18168762297
结合旋转云台可实现720°无死角点云覆盖;
新增视觉相机,引入视觉SLAM算法,
可有效提升弱结构特征场景的三维重建适应性;
详情请咨询:
郭经理:17312275363
马经理:18168762297
配备飞马行业级SLAM算法,真正意义上实现超自在的场景适应和高精度的随扫快建,
为3D移动测量需求提供高效、精准的解决方案。
自研惯导芯片
得益于自研的高精度惯导芯片,SLAM2000可有效抑制数据采集中的累计误差;全面优化的雷达标定算法和不断升级的行业SLAM算法,可确保SLAM2000在各种应用场景下快速输出高精度三维成果。
实时建图
搭载了高性能计算核心的SLAM2000,能在数据采集的过程中进行地图构建,
在数据采集完成后直接输出成果数据,即实现实时建图,
可大幅提高如应急救援等时效要求较高的应用场景。
扩展模块
SLAM2000拥有Type-C、航插等多种外部接口,
可外接电源、S-RTK100、背包等扩展模块,满足用户更多的应用需求。
智能电池手柄
SLAM2000使用更为安全的3000mAh可更换式智能电池手柄,可保证SLAM2000持续稳定工作95分钟。充电采用Type-C接口,标配65W快充设备,保证SALM2000的电量补给。
配套软件,解算无忧
SLAM2000标配SLAM GO APP软件和SLAM GO POST数据解算软件,结合行业级SLAM算法可一键实现高精度点云成果输出、坐标转换、点云赋色等。通过手机APP还可以查询设备工作参数、预览实时建图结果、进行设备固件升级和维护等。